|
|
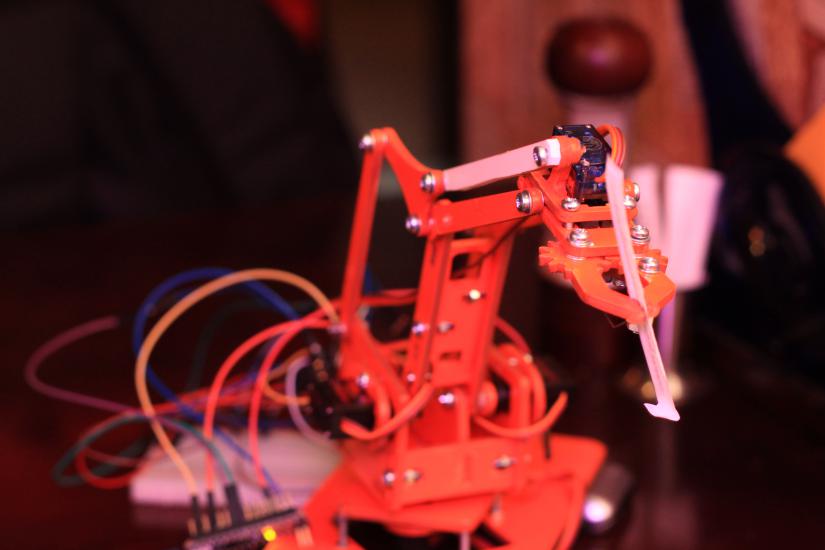
Управление роботом MeArm с помощью среды GrasshopperПроект управления роботом-рукой с помощью генерирования кода управления в реальном времени в среде RhinoGrasshopper. Проект реализован посредством плагина Firefly, библиотеки Firmata, микроконтроллера Arduino в рамках изучения возможностей передовой архитектуры
 | |
|
|
|
||||
| 2008-2025 Проектанты РУ биржа удаленной работы для инженеров проектировщиков.
Фриланс для инженеров
| ||||

 Нравится
Нравится
Чтобы оставить комментарий, вы должны войти или зарегистрироваться